დღეისათვის, ბაზარზე არსებული აქტივატორების უმეტესობას აქვს ორი ტიპის ძალის კონტროლის მეთოდი:
1. მიმდინარე მარყუჟის ძალის კონტროლი
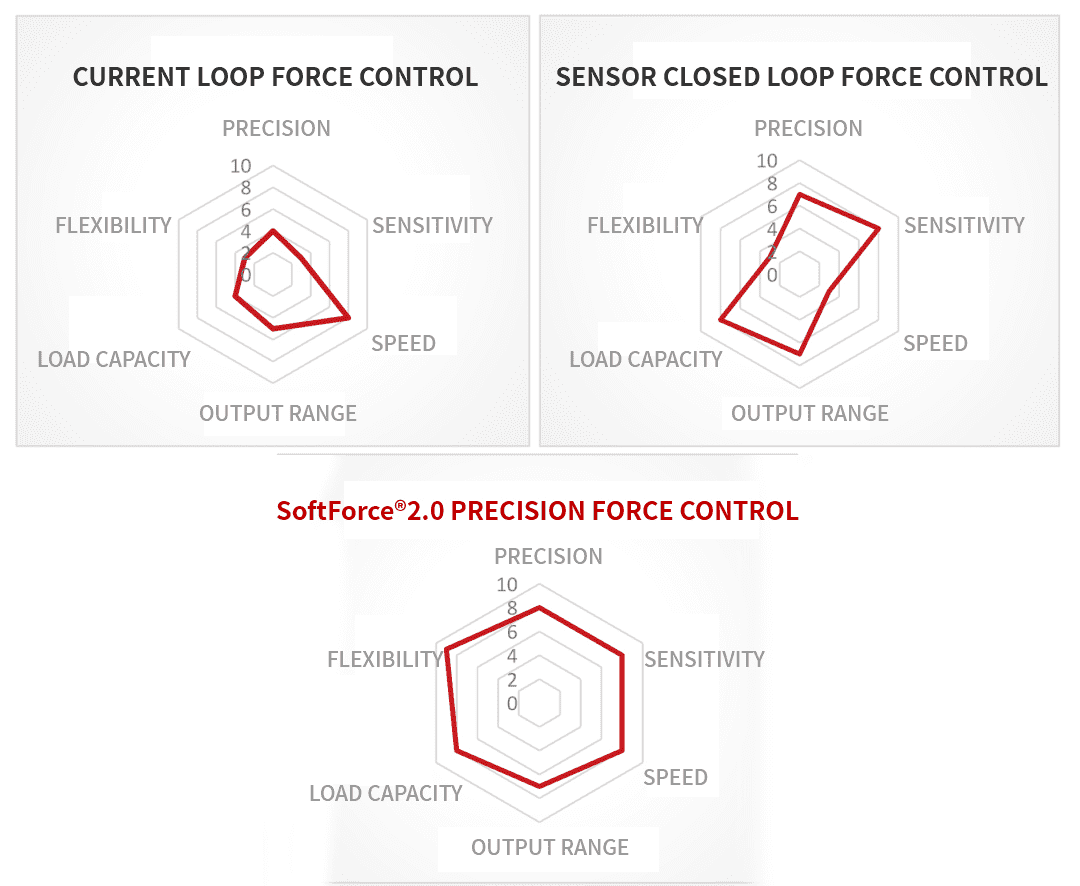
შედარებით ადვილად გამოსაყენებელი ძალის კონტროლის ჩვეულებრივი მეთოდი, რომელიც ახორციელებს ძალის კონტროლს ძრავის შიდა დენის რეგულირებით.უპირატესობა ის არის, რომ მისი განხორციელება ნაკლებად რთულია და მას შეუძლია ძალის კონტროლის მიღწევა 5%-15% სიზუსტის ფარგლებში;მინუსი ის არის, რომ მოძრაობის სიჩქარე ნელია, მისი უკუსვლა შეუძლებელია და ვერ აკმაყოფილებს ზოგიერთი სცენარის საჭიროებებს უფრო მაღალი სიზუსტის მოთხოვნებით.გამოყენების პერიოდის შემდეგ, მექანიკური ტარება გამოიწვევს შეცდომებს და კიდევ უფრო შეამცირებს სიზუსტეს.
ასეთ აქტუატორებს, როგორც წესი, არ აქვთ სენსორები და სენსორების არსებობის შემთხვევაში კი ისინი მხოლოდ ძალის „ჩვენებად“ იყენებენ და არ მონაწილეობენ კონტროლში.მაგალითად, პრესაზე სენსორის დამატებისას, სენსორი კითხულობს ძალის ზომას და აჩვენებს მნიშვნელობას მრიცხველის საშუალებით, რომელიც გამოიყენება ძალის ზომის ხელით რეგულირებისთვის, მაგრამ ამ რეგულირებას ზოგადად არაფერი აქვს საერთო. ძალის სიზუსტით.

სქემატური დიაგრამა, რომელიც არ არის დაკავშირებული გრაფიკასთან და ტექსტთან
2. სენსორის დახურული მარყუჟის ძალის კონტროლი
ძალის კონტროლის კიდევ ერთი მეთოდია ჩვეულებრივი ძალის სენსორისა და ჩვეულებრივი დახურული მარყუჟის მართვის ალგორითმის დამატება.უპირატესობა ის არის, რომ სიზუსტე გაუმჯობესებულია, მაგრამ მინუსი ის არის, რომ სიჩქარე ჯერ კიდევ ნელია.ამ გზით ძალის კონტროლის სიზუსტე შეიძლება გაიზარდოს 5%-დან 1%-მდე.თუ არ არის სწორი ალგორითმის დამუშავება, ან სენსორის სიჩქარე არ არის საკმარისად სწრაფი, ის მიდრეკილია „გადაჭარბებისკენ“.
ძალის კონტროლირებადი აქტივატორი
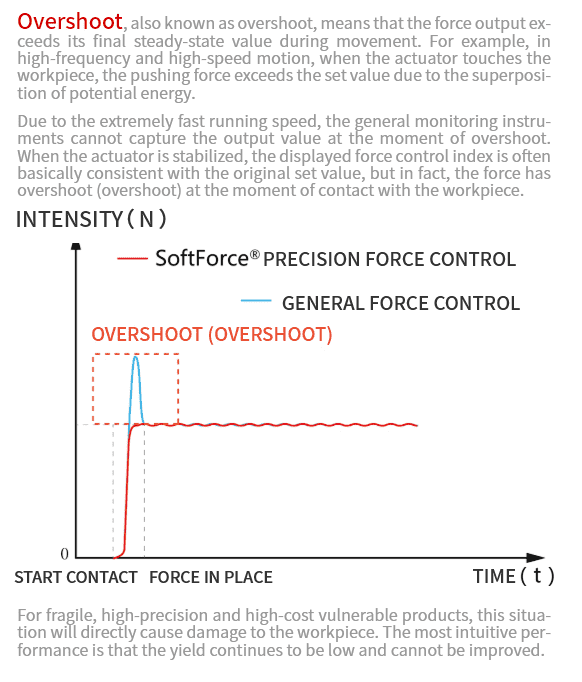
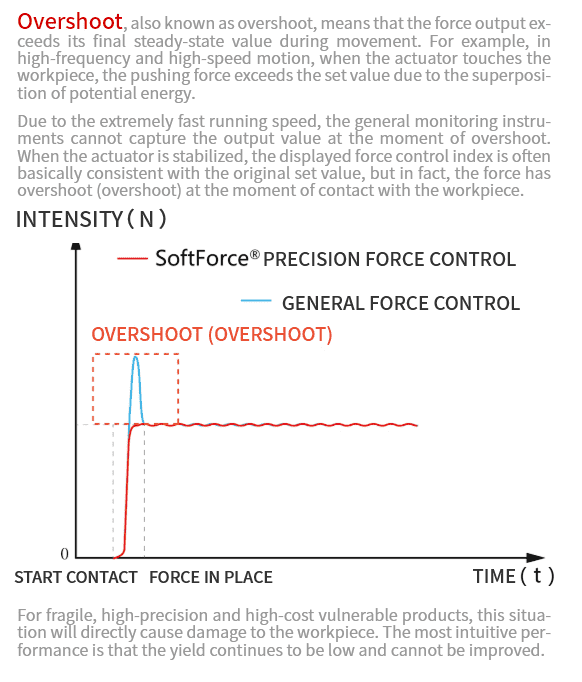
გარდაუვალი "გადაჭარბება"?
სენსორის დახურული მარყუჟის ძალის კონტროლის მეთოდი რთულია დარტყმის ძალასთან გამკლავება.ყველაზე პირდაპირი გამოვლინება ის არის, რომ „გადაჭარბება“ ძალიან ადვილია, როდესაც საქმე გვაქვს მაღალი ტემპის მოთხოვნების მქონე სცენებთან.
მაგალითად
ზოგადად, მაღალი სიჩქარისა და დიდი სიმძლავრის შემთხვევაში, მომენტი, როდესაც აქტივატორი სამუშაო ნაწილს ეხება, ხშირად განსაკუთრებით დიდია.მაგალითად, თუ ამძრავის ბიძგების ძალა დაყენებულია 10N-ზე, ადვილია მიაღწიოთ 11N და 12N-ს, როდესაც ის ეხება სამუშაო ნაწილს, შემდეგ კი მას უბრუნდება 10N-ზე კონტროლის ალგორითმის მეშვეობით.ასეთი პრობლემები ხშირად ჩნდება, როდესაც ბაზარს ემატება ძალის სენსორები და ეგრეთ წოდებული ძალის კონტროლირებადი აქტივატორები.
ეს არის პრობლემა, რომ რეაგირების სიჩქარე არ არის საკმარისად სწრაფი.მაღალი სიჩქარე და ზუსტი და სტაბილური გამომავალი თავისთავად წყვილი წინააღმდეგობებია.თუ არის გადაჭარბება (გადასვლა), ადგილზე ზუსტი ძალა უაზროა.
განსაკუთრებით ზეწოლის შეკრების ზუსტი აღჭურვილობის პროცესში, მყიფე და ძვირადღირებული ნაწილების გადაჭარბება ზოგადად დაუშვებელია.
სრული ძალის კონტროლი, მაღალი სიხშირე და მაღალი სიჩქარე გადაჭარბების გარეშე?
როგორ აკეთებს ამას TA?
მაღალი სიზუსტის გამოყენების სცენარებისთვის მიღებულია „რბილი დაშვების“ მეთოდი, რათა გაითვალისწინოს მაღალი სიჩქარისა და მაღალი სიზუსტის მოთხოვნები, ანუ სეგმენტირებული ძალის კონტროლი.ამძრავი სწრაფად უახლოვდება სამუშაო ნაწილს პოზიციის მოძრაობის რეჟიმის მეშვეობით, სწრაფად გადადის ძალის კონტროლის რეჟიმში იმ პოზიციაზე, სადაც ის აპირებს სამუშაო ნაწილთან შეხებას და თანდათან ზრდის გამომავალს, სანამ არ მიაღწევს წინასწარ დაყენებულ მნიშვნელობას.პოზიციის რეჟიმი + ძალის კონტროლის რეჟიმი + ძალის სტაბილიზაციის დრო, გამოყენებული მთლიანი დრო არის აქტივატორის ერთჯერადი შესრულების ეფექტურობა.
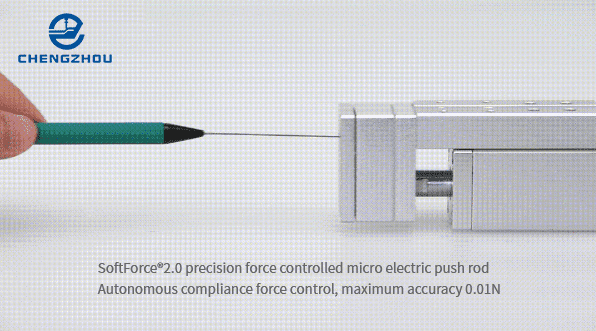
მაღალი სიჩქარის ძალის სენსორთან და მოდელზე დაფუძნებული პროგნოზირებადი კონტროლის ალგორითმთან ერთად, SoftForce®2.0 ზუსტი ძალის კონტროლირებადი ამძრავი ავტომატურად შეუძლია ამოიცნოს ამძრავის პოზიცია და საკონტაქტო მდგომარეობა სამუშაო ნაწილთან, ისე, რომ აქტივატორი, როგორც ავტომატიზაციის დასასრული. მოწყობილობას აქვს იგივე ფუნქცია, როგორც ადამიანის ხელი.ტაქტილური აღქმა, კონტროლი და შესრულების ინტელექტი.
ამავე მანძილზე, "SoftForce ®2.0 Precision Force Control"-ის რბილი დაშვების სიჩქარის დიაპაზონი იზრდება, ტოლერანტობა უფრო დიდია და მას შეუძლია მიაღწიოს სრული ძალის კონტროლსაც კი, რაც პირდაპირ აუმჯობესებს წარმოების ციკლს და მნიშვნელოვნად ამცირებს საცდელი და ღირებულების ღირებულებას. შეცდომის დადასტურება.
▋დამუშავების მაღალი სიხშირე უკეთესი მუშაობის მისაღწევად
"ექვსღერძიანი ძალის სენსორი + რობოტი" ძალის კონტროლის სქემის გაანგარიშების ციკლი, რომელიც ჩვეულებრივ გამოიყენება ბაზარზე არის 5-10 მილიწამი, ანუ დამუშავების სიხშირე 100-200 ჰც.SoftForce®2.0 ზუსტი ძალით კონტროლირებადი აქტივატორების დამუშავების სიხშირე შეიძლება მიაღწიოს 4000Hz-ს (ანუ 0,25 მილიწამს), ხოლო მაღალი სიხშირის სერიის მოდელების შეიძლება მიაღწიოს 8000Hz-ს, რაც 4-8-ჯერ აღემატება ზოგადი რობოტის ძალით კონტროლირებადი ამძრავების დამუშავების სიხშირეს.
▋მოქმედი შესაბამისი ძალის კონტროლი, რომელიც შეიძლება მოჰყვეს გარე ძალის ცვლილებას
ეფექტური რეაგირების სიჩქარე და მყისიერი ძალის გამოხმაურება საშუალებას აძლევს ამძრავს მყისიერად უპასუხოს გარე ძალებს და მიაღწიოს შესაბამის ძალის აქტიურ კონტროლს.მაშინაც კი, თუ ექსპლუატაციის დროს გარე ძალები შეგხვდებათ, მისი დროულად რეგულირება შესაძლებელია, რაც პროცესი უფრო ზუსტი გახდება.სამუშაო ნაწილების უკეთესი დაცვა.
მაღალი სიხშირე და მაღალი სიჩქარე გადაჭარბების გარეშე
მაღალი სიხშირის და მაღალი სიჩქარის მოძრაობის დროსაც კი, ის მაინც ინარჩუნებს გამომავალი სიზუსტის მაღალ სიზუსტეს და ამავდროულად უზრუნველყოფს „რბილ დაშვებას“ და „გადაჭარბების გარეშე“, კონტაქტს ნაწილების ზედაპირს მაღალი სიჩქარით, მცირე ძალით და ასრულებს მოქნილს. ნაწილების კრეფა და განთავსება და ა.შ., რათა თავიდან იქნას აცილებული დელიკატური და მყიფე ნაწილების დაზიანება.კომპონენტები.
SoftForce®2.0 ზუსტი ძალის კონტროლი
HF სერიის ახალი განახლება
▋ უფრო ძლიერი გადატვირთვის საწინააღმდეგო უნარი
ადგილზე პროცესისა და მრავალჯერადი გამეორების სიღრმისეული გაგების საფუძველზე, Chengzhou-ს ახლად განახლებული SoftForce®2.0 ზუსტი ძალის კონტროლის HF სერია მიმდინარე წლის თებერვალში აქვს ინტეგრირებული სენსორის დიზაინი და მისი გადატვირთვის საწინააღმდეგო შესაძლებლობა რამდენჯერმე აღემატება. წარსულში, უფრო მაღალი გამძლეობითა და გამოყენების სიმარტივით.გაუმკლავდეს უფრო რთულ პირობებს.
▋შეიძლება გაითვალისწინოს როგორც მცირე ძალა, ასევე დიდი გამომავალი
აღჭურვილია SoftForce®2.0 მაღალი სიზუსტის ძალის კონტროლის სისტემით, ზუსტი ძალის კონტროლირებადი სასრიალო მაგიდა და ბიძგის ჯოხი დიდი დარტყმითა და დიდი დატვირთვით, შეუძლია გამოიმუშაოს მცირე და ზუსტი ძალა მაღალი დატვირთვის დროს და ასევე შეუძლია გაითვალისწინოს ძალა ამავე დროს. დრო და გამომავალი დიაპაზონი უფრო ფართოა.უფრო დიდი, ანუ უფრო ფართო ძალის დინამიური დიაპაზონი*.
*ძალების დინამიური დიაპაზონი: თანაფარდობა მაქსიმალურ და მინიმალურ ძალას შორის, რომელიც შეიძლება გამოვიდეს.
ძალის ზუსტი კონტროლის გამოყენება შესაძლებელია მხოლოდ ერთ ღერძზე
SoftForce®2.0 ზუსტი ძალით კონტროლირებადი აქტივატორების გამოყენება შესაძლებელია არა მხოლოდ ერთ ღერძში, არამედ იძლევა უფრო მეტ შესაძლებლობებს მრავალღერძიანი ასამბლეის გადაწყვეტილებებისთვის.მაგალითად, უახლესი "RM Chengzhou 2D სინქრონული ზუსტი ძალის კონტროლის პლატფორმის კონტროლის სისტემა", რომელიც ამოქმედდა Chengzhou Technology-ის მიერ, შედგება ორი Chengzhou ზუსტი ძალით კონტროლირებადი ელექტრული აქტივატორისგან, რომელსაც შეუძლია შეცვალოს "ექვსღერძიანი სენსორი + რობოტი" კონტროლის სქემის ძალა. გამოიყენება მობილური ტელეფონების შიდა ჩარჩოს ზუსტი დაფქვა-გასხვისთვის და ა.შ.
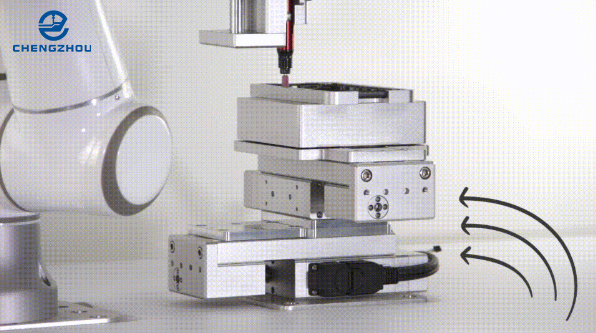
Chengzhou 2D სინქრონული ზუსტი ძალის კონტროლის პლატფორმის კონტროლის სისტემა
(აღჭურვილია SoftForce®2.0 მაღალი სიზუსტის ძალის კონტროლის სისტემით)
დახვეწილი და ადვილად გამოსაყენებელი პროფესიონალური მომსახურება
გაფართოებული კონტროლის ალგორითმი და მარტივი გამართვის პროცესი მომხმარებელთა მოსახერხებელ გამოცდილებას მოაქვს.დაბალი დონის ფონის მქონე ოპერატორსაც კი შეუძლია 5 წუთში გაშვება, ჭეშმარიტად "ჩართეთ და ითამაშეთ".
ამავდროულად, Chengzhou Technology-ის პროფესიონალურ და ძლიერ გაყიდვების შემდგომ ტექნიკური მომსახურების გუნდს შეუძლია მომხმარებელს მიაწოდოს დროული, ყოვლისმომცველი და უპრობლემო ტექნიკური მხარდაჭერა პირველად, იქნება ეს ტექნიკური ეჭვები, სწავლება, პრობლემების აღმოფხვრა თუ ტექნიკური მომსახურება.
Chengzhou Technology ყოველთვის იყო საკმარისად მამაცი, რათა გაეფართოებინა თავისი საზღვრები.თავისი მყარი და ინოვაციური ტექნიკური სიმტკიცით, მან განუწყვეტლივ გამოუშვა უფრო ინტელექტუალური, უფრო ზუსტი და უფრო თავსებადი მაღალი ხარისხის აქტივატორი პროდუქტები, რათა უზრუნველყოს მოწინავე პროდუქტები ნახევარგამტარული შეფუთვისა და ტესტირებისთვის, 3C ავტომატიზაციის, ზუსტი წარმოების, ჭკვიანი სამედიცინო და სხვა ინდუსტრიებისთვის.ძირითადი კომპონენტები, როგორიცაა მოძრაობის კონტროლის ზუსტი სისტემები და აქტივატორები.
გამოქვეყნების დრო: მაისი-31-2022